現在我們用堆棧解決一個有意思的問題,定義一個二維數組:
int maze[5][5] = {
0, 1, 0, 0, 0,
0, 1, 0, 1, 0,
0, 0, 0, 0, 0,
0, 1, 1, 1, 0,
0, 0, 0, 1, 0,
};它表示一個迷宮,其中的1表示牆壁,0表示可以走的路,只能橫着走或豎著走,不能斜着走,要求編程序找出從左上角到右下角的路線。程序如下:
例 12.3. 用深度優先搜索解迷宮問題
#include <stdio.h>
#define MAX_ROW 5
#define MAX_COL 5
struct point { int row, col; } stack[512];
int top = 0;
void push(struct point p)
{
stack[top++] = p;
}
struct point pop(void)
{
return stack[--top];
}
int is_empty(void)
{
return top == 0;
}
int maze[MAX_ROW][MAX_COL] = {
0, 1, 0, 0, 0,
0, 1, 0, 1, 0,
0, 0, 0, 0, 0,
0, 1, 1, 1, 0,
0, 0, 0, 1, 0,
};
void print_maze(void)
{
int i, j;
for (i = 0; i < MAX_ROW; i++) {
for (j = 0; j < MAX_COL; j++)
printf("%d ", maze[i][j]);
putchar('\n');
}
printf("*********\n");
}
struct point predecessor[MAX_ROW][MAX_COL] = {
{{-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}},
{{-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}},
{{-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}},
{{-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}},
{{-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}, {-1,-1}},
};
void visit(int row, int col, struct point pre)
{
struct point visit_point = { row, col };
maze[row][col] = 2;
predecessor[row][col] = pre;
push(visit_point);
}
int main(void)
{
struct point p = { 0, 0 };
maze[p.row][p.col] = 2;
push(p);
while (!is_empty()) {
p = pop();
if (p.row == MAX_ROW - 1 /* goal */
&& p.col == MAX_COL - 1)
break;
if (p.col+1 < MAX_COL /* right */
&& maze[p.row][p.col+1] == 0)
visit(p.row, p.col+1, p);
if (p.row+1 < MAX_ROW /* down */
&& maze[p.row+1][p.col] == 0)
visit(p.row+1, p.col, p);
if (p.col-1 >= 0 /* left */
&& maze[p.row][p.col-1] == 0)
visit(p.row, p.col-1, p);
if (p.row-1 >= 0 /* up */
&& maze[p.row-1][p.col] == 0)
visit(p.row-1, p.col, p);
print_maze();
}
if (p.row == MAX_ROW - 1 && p.col == MAX_COL - 1) {
printf("(%d, %d)\n", p.row, p.col);
while (predecessor[p.row][p.col].row != -1) {
p = predecessor[p.row][p.col];
printf("(%d, %d)\n", p.row, p.col);
}
} else
printf("No path!\n");
return 0;
}運行結果如下:
2 1 0 0 0 2 1 0 1 0 0 0 0 0 0 0 1 1 1 0 0 0 0 1 0 ********* 2 1 0 0 0 2 1 0 1 0 2 0 0 0 0 0 1 1 1 0 0 0 0 1 0 ********* 2 1 0 0 0 2 1 0 1 0 2 2 0 0 0 2 1 1 1 0 0 0 0 1 0 ********* 2 1 0 0 0 2 1 0 1 0 2 2 0 0 0 2 1 1 1 0 2 0 0 1 0 ********* 2 1 0 0 0 2 1 0 1 0 2 2 0 0 0 2 1 1 1 0 2 2 0 1 0 ********* 2 1 0 0 0 2 1 0 1 0 2 2 0 0 0 2 1 1 1 0 2 2 2 1 0 ********* 2 1 0 0 0 2 1 0 1 0 2 2 0 0 0 2 1 1 1 0 2 2 2 1 0 ********* 2 1 0 0 0 2 1 0 1 0 2 2 2 0 0 2 1 1 1 0 2 2 2 1 0 ********* 2 1 0 0 0 2 1 2 1 0 2 2 2 2 0 2 1 1 1 0 2 2 2 1 0 ********* 2 1 2 0 0 2 1 2 1 0 2 2 2 2 0 2 1 1 1 0 2 2 2 1 0 ********* 2 1 2 2 0 2 1 2 1 0 2 2 2 2 0 2 1 1 1 0 2 2 2 1 0 ********* 2 1 2 2 2 2 1 2 1 0 2 2 2 2 0 2 1 1 1 0 2 2 2 1 0 ********* 2 1 2 2 2 2 1 2 1 2 2 2 2 2 0 2 1 1 1 0 2 2 2 1 0 ********* 2 1 2 2 2 2 1 2 1 2 2 2 2 2 2 2 1 1 1 0 2 2 2 1 0 ********* 2 1 2 2 2 2 1 2 1 2 2 2 2 2 2 2 1 1 1 2 2 2 2 1 0 ********* 2 1 2 2 2 2 1 2 1 2 2 2 2 2 2 2 1 1 1 2 2 2 2 1 2 ********* (4, 4) (3, 4) (2, 4) (1, 4) (0, 4) (0, 3) (0, 2) (1, 2) (2, 2) (2, 1) (2, 0) (1, 0) (0, 0)
這次堆棧裡的元素是結構體類型的,用來表示迷宮中一個點的x和y座標。我們用一個新的資料結構保存走迷宮的路線,每個走過的點都有一個前趨(Predecessor)點,表示是從哪兒走到當前點的,比如predecessor[4][4]是座標為(3, 4)的點,就表示從(3, 4)走到了(4, 4),一開始predecessor的各元素初始化為無效座標(-1, -1)。在迷宮中探索路線的同時就把路線保存在predecessor數組中,已經走過的點在maze數組中記為2防止重複走,最後找到終點時就根據predecessor數組保存的路線從終點打印到起點。為了幫助理解,我把這個算法改寫成偽代碼(Pseudocode)如下:
將起點標記為已走過並壓棧;
while (棧非空) {
從棧頂彈出一個點p;
if (p這個點是終點)
break;
否則沿右、下、左、上四個方向探索相鄰的點
if (和p相鄰的點有路可走,並且還沒走過)
將相鄰的點標記為已走過並壓棧,它的前趨就是p點;
}
if (p點是終點) {
打印p點的座標;
while (p點有前趨) {
p點 = p點的前趨;
打印p點的座標;
}
} else
沒有路線可以到達終點;我在while循環的末尾插了打印語句,每探索一步都打印出當前迷宮的狀態(標記了哪些點),從打印結果可以看出這種搜索算法的特點是:每次探索完各個方向相鄰的點之後,取其中一個相鄰的點走下去,一直走到無路可走了再退回來,取另一個相鄰的點再走下去。這稱為深度優先搜索(DFS,Depth First Search)。探索迷宮和堆棧變化的過程如下圖所示。
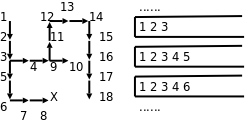
圖中各點的編號表示探索順序,堆棧中保存的應該是座標,我在畫圖時為了直觀就把各點的編號寫在堆棧裡了。可見正是堆棧後進先出的性質使這個算法具有了深度優先的特點。如果在探索問題的解時走進了死衚衕,則需要退回來從另一條路繼續探索,這種思想稱為回溯(Backtrack),一個典型的例子是很多編程書上都會講的八皇后問題。
最後我們打印終點的座標並通過predecessor資料結構找到它的前趨,這樣順藤摸瓜一直打印到起點。那麼能不能從起點到終點正向打印路線呢?在上一節我們看到,數組支持隨機訪問也支持順序訪問,如果在一個循環裡打印數組,既可以正向打印也可以反向打印。但predecessor這種資料結構卻有很多限制:
可見,有什麼樣的資料結構就決定了可以用什麼樣的算法。那為什麼不再建一個successor數組來保存每個點的後繼呢?從DFS算法的過程可以看出,雖然每個點的前趨只有一個,後繼卻不止一個,如果我們為每個點只保存一個後繼,則無法保證這個後繼指向正確的路線。由此可見,有什麼樣的算法就決定了可以用什麼樣的資料結構。設計算法和設計資料結構這兩件工作是緊密聯繫的。