映射
映射也被稱爲哈希表(hash table)、字典。它是一種由key-value組成的抽象數據結構。大多數情況下,它都能在O(1)的時間複雜度下實現增刪改查功能。若在極端情況下出現所有key都發生哈希碰撞時則退回成鏈表形式,此時複雜度爲O(N)。
映射底層一般都是由數組組成,該數組每個元素稱爲桶,它使用hash函數將key分配到不同桶中,若出現碰撞衝突時候,則採用鏈地址法(也稱爲拉鍊法)或者開放尋址法解決衝突。下圖就是一個由姓名-號碼構成的哈希表的結構圖:

Go語言中映射中key若出現衝突碰撞時候,則採用鏈地址法解決,Go語言中映射具有以下特點:
- 引用類型變量
- 讀寫併發不安全
- 遍歷結果是隨機的
數據結構
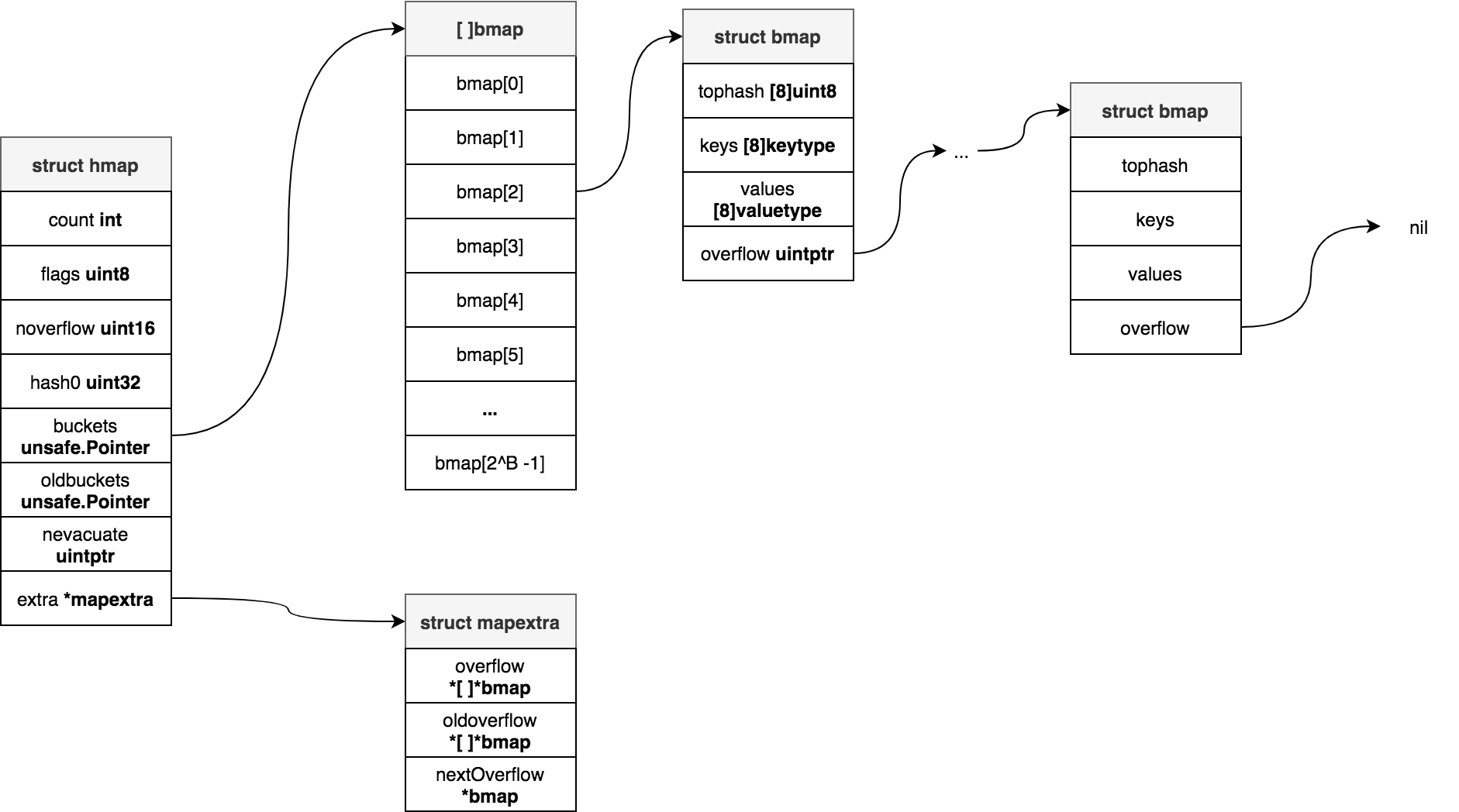
Go語言中映射的數據結構是 runtime.hmap(runtime/map.go):
// A header for a Go map.
type hmap struct {
count int // 元素個數,用於len函數返回map元素數量
flags uint8 // 標誌位,標誌當前map正在寫等狀態
B uint8 // buckets個數的對數,即桶數量 = 2 ^ B
noverflow uint16 // overflow桶數量的近似值,overflow桶即溢出桶,即鏈表法中存在鏈表上的桶的個數
hash0 uint32 // 隨機數種子,用於計算key的哈希值
buckets unsafe.Pointer // 指向buckets數組,如果元素個數爲0時,該值爲nil
oldbuckets unsafe.Pointer // 擴容時指向舊的buckets
nevacuate uintptr // 用於指示遷移進度,小於此值的桶已經遷移完成
extra *mapextra // 額外記錄overflow桶信息
}
映射中每一個桶的結構是 runtime.bmap(runtime/map.go):
// A bucket for a Go map.
type bmap struct {
tophash [bucketCnt]uint8
}
上面bmap結構是靜態結構,在編譯過程中 runtime.bmap 會拓展成以下結構體:
type bmap struct{
tophash [8]uint8
keys [8]keytype // keytype 由編譯器編譯時候確定
values [8]elemtype // elemtype 由編譯器編譯時候確定
overflow uintptr // overflow指向下一個bmap,overflow是uintptr而不是*bmap類型,是爲了減少gc
}
bmap結構示意圖:
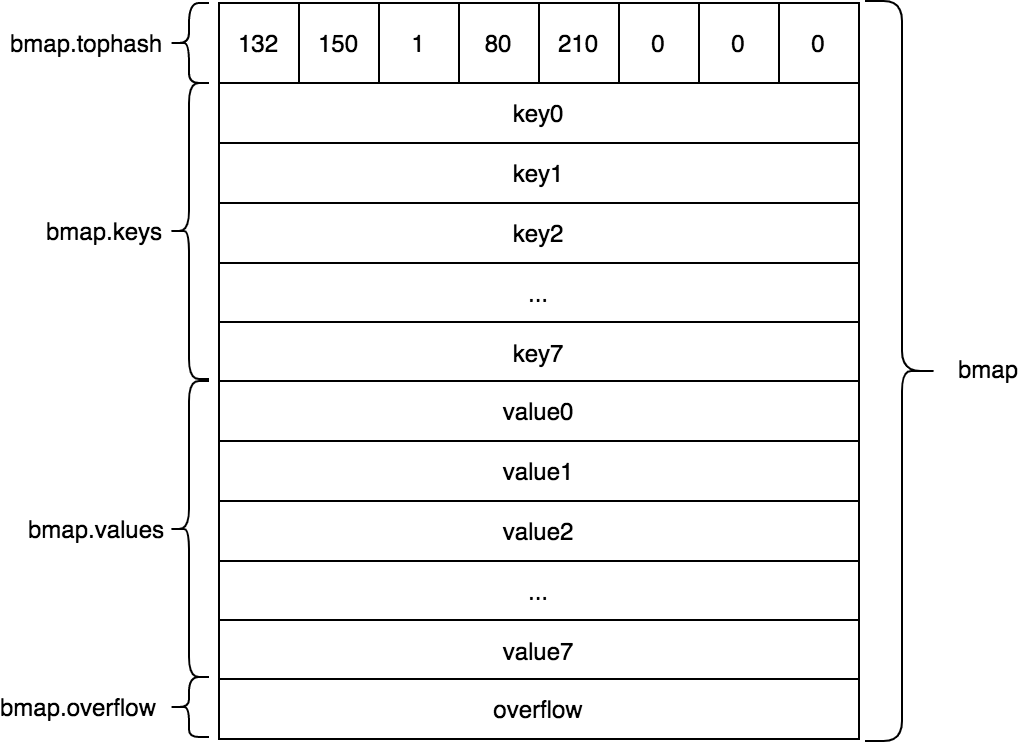
每個桶bmap中可以裝載8個key-value鍵值對。當一個key確定存儲在哪個桶之後,還需要確定具體存儲在桶的哪個位置(這個位置也稱爲桶單元,一個bmap裝載8個key-value鍵值對,那麼一個bmap共8個桶單元),bmap中tophash就是用於實現快速定位key的位置。在實現過程中會使用key的hash值的高八位作爲tophash值,存放在bmap的tophash字段中。tophash計算公式如下:
func tophash(hash uintptr) uint8 {
top := uint8(hash >> (sys.PtrSize*8 - 8))
if top < minTopHash {
top += minTopHash
}
return top
}
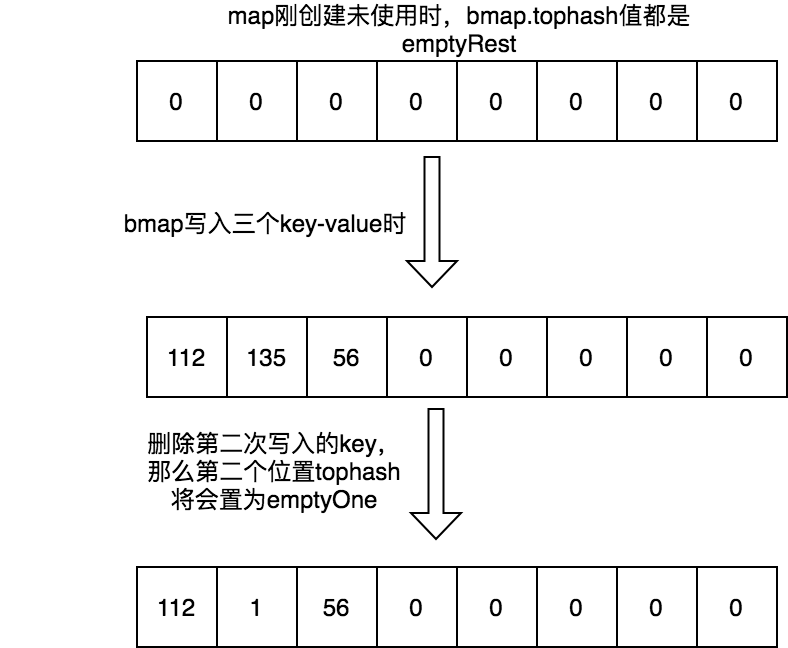
上面函數中hash是64位的,sys.PtrSize值是8,所以top := uint8(hash >> (sys.PtrSize*8 - 8))等效top = uint8(hash >> 56),最後top取出來的值就是hash的最高8位值。bmap的tophash字段不光存儲key哈希值的高八位,還會存儲一些狀態值,用來表明當前桶單元狀態,這些狀態值都是小於minTopHash的。
爲了避免key哈希值的高八位值出現這些狀態值相等產生混淆情況,所以當key哈希值高八位若小於minTopHash時候,自動將其值加上minTopHash作爲該key的tophash。桶單元的狀態值如下:
emptyRest = 0 // 表明此桶單元爲空,且更高索引的單元也是空
emptyOne = 1 // 表明此桶單元爲空
evacuatedX = 2 // 用於表示擴容遷移到新桶前半段區間
evacuatedY = 3 // 用於表示擴容遷移到新桶後半段區間
evacuatedEmpty = 4 // 用於表示此單元已遷移
minTopHash = 5 // key的tophash值與桶狀態值分割線值,小於此值的一定代表着桶單元的狀態,大於此值的一定是key對應的tophash值
emptyRest和emptyOne狀態都表示此桶單元爲空,都可以用來插入數據。但是emptyRest還代表着更高單元也爲空,那麼遍歷尋找key的時候,當遇到當前單元值爲emptyRest時候,那麼更高單元無需繼續遍歷。
下圖中桶單元1的tophash值是emptyOne,桶單元3的tophash值是emptyRest,那麼我們一定可以推斷出桶單元3以上都是emptyRest狀態。
bmap中可以裝載8個key-value,這8個key-value並不是按照key1/value1/key2/value2/key3/value3...這樣形式存儲,而採用key1/key2../key8/value1/../value8形式存儲,因爲第二種形式可以減少padding,源碼中以map[int64]int8舉例說明。
hmap中extra字段是 runtime.mapextra 類型,用來記錄額外信息:
// mapextra holds fields that are not present on all maps.
type mapextra struct {
overflow *[]*bmap // 指向overflow桶指針組成的切片,防止這些溢出桶被gc了
oldoverflow *[]*bmap // 擴容時候,指向舊的溢出桶組成的切片,防止這些溢出桶被gc了
//指向下一個可用的overflow 桶
nextOverflow *bmap
}
當映射的key和value都不是指針類型時候,bmap將完全不包含指針,那麼gc時候就不用掃描bmap。bmap指向溢出桶的字段overflow是uintptr類型,爲了防止這些overflow桶被gc掉,所以需要mapextra.overflow將它保存起來。如果bmap的overflow是*bmap類型,那麼gc掃描的是一個個拉鍊表,效率明顯不如直接掃描一段內存(hmap.mapextra.overflow)
映射的創建
當使用make函數創建映射時候,若不指定map元素數量時候,底層將使用是make_small函數創建hmap結構,此時只產生哈希種子,不初始化桶:
func makemap_small() *hmap {
h := new(hmap)
h.hash0 = fastrand()
return h
}
若指定map元素數量時候,底層會使用 makemap 函數創建hmap結構:
func makemap(t *maptype, hint int, h *hmap) *hmap {
mem, overflow := math.MulUintptr(uintptr(hint), t.bucket.size)
if overflow || mem > maxAlloc { // 檢查所有桶佔用的內存是否大於內存限制
hint = 0
}
// h不nil,說明map結構已經創建在棧上了,這個操作由編譯器處理的
if h == nil { // h爲nil,則需要創建一個hmap類型
h = new(hmap)
}
h.hash0 = fastrand() // 設置map的隨機數種子
B := uint8(0)
for overLoadFactor(hint, B) { // 設置合適B的值
B++
}
h.B = B
// 如果B == 0,那麼map的buckets,將會惰性分配(allocated lazily),使用時候再分配
// 如果B != 0時,初始化桶
if h.B != 0 {
var nextOverflow *bmap
h.buckets, nextOverflow = makeBucketArray(t, h.B, nil)
if nextOverflow != nil {
h.extra = new(mapextra)
h.extra.nextOverflow = nextOverflow // extra.nextOverflow指向下一個可用溢出桶位置
}
}
return h
}
makemap函數的第一個參數是maptype類指針,它描述了創建的map中key和value元素的類型信息以及其他map信息,第二個參數hint,對應是make([Type]Type, len)中len參數,第三個參數h,如果不爲nil,說明當前map的結構已經有編譯器在棧上創建了,makemap只需要完成設置隨機數種子等操作。
overLoadFactor函數用來判斷當前映射的加載因子是否超過加載因子閾值。makemap使用overLoadFactor函數來調整B值。
加載因子,也稱爲擴容因子,或者負載因子,用來描述哈希表中元素填滿程度,加載因子越大,表明哈希表中元素越多,空間利用率高,但是這也意味着衝突的機會就會加大。加載因子是通過寫入元素個數除以桶個數得到,當哈希表中所有桶已寫滿情況下,此時加載因子是1,此時再寫入新key一定會產生衝突碰撞。爲了提高哈希表寫入效率就必須在加載因子超過一定值時(這個值稱爲加載因子閾值),進行rehash操作,將桶容量進行擴容,來儘量避免出現衝突情況。
Java中hashmap的默認加載因子閾值是0.75,Go語言中映射的加載因子閾值是6.5。爲什麼Go映射的加載因子閾值不是0.75,而且超過了1?這是因爲Java中哈希表的桶存放的是一個key-value,其滿載因子是1,Go映射中每個桶可以存8個key-value,滿載因子是8,當加載因子閾值爲6.5時候空間利用率和寫入性能達到最佳平衡。
func overLoadFactor(count int, B uint8) bool {
// count > bucketCnt,bucketCnt值是8,每一個桶可以存放8個key-value,如果map中元素個數count小於8那麼一定不會超過加載因子
// loadFactorNum和loadFactorDen的值分別是13和2,bucketShift(B)等效於1<<B
// 所以 uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen) 等於 uintptr(count) > 6.5 * 2^ B
return count > bucketCnt && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen)
}
// bucketShift returns 1<<b, optimized for code generation.
func bucketShift(b uint8) uintptr {
return uintptr(1) << (b & (sys.PtrSize*8 - 1))
}
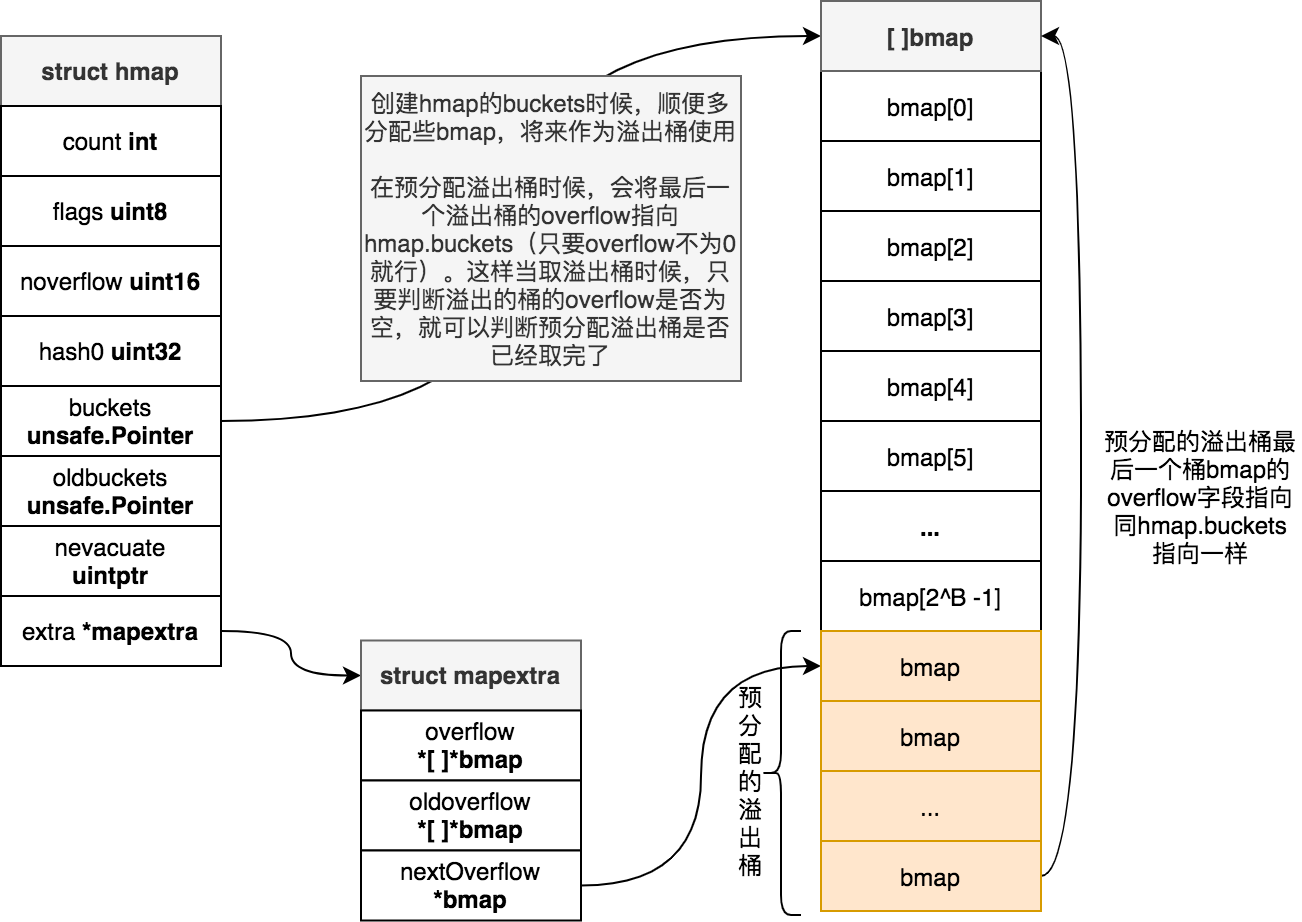
makeBucketArray函數是用來創建bmap array,來用作爲map的buckets。對於創建時指定元素大小超過(2^4) * 8時候,除了創建map的buckets,也會提前分配好一些桶作爲溢出桶。buckets和溢出桶,在內存上是連續的。爲啥提前分配好溢出桶,而不是在溢出時候,再分配,這是因爲現在分配是直接申請一大片內存,效率更高。
hamp.extra.nextOverflow指向該溢出桶,溢出桶的除了最後一個桶的overflow指向map的buckets,其他桶的overflow指向nil,這是用來判斷溢出桶最後邊界,後面代碼有涉及此處邏輯。
func makeBucketArray(t *maptype, b uint8, dirtyalloc unsafe.Pointer) (buckets unsafe.Pointer, nextOverflow *bmap) {
base := bucketShift(b) // 等效於 base := 1 << b
nbuckets := base
if b >= 4 { // 對於小b,不太可能出現溢出桶,所以B超過4時候,才考慮提前分配寫溢出桶
nbuckets += bucketShift(b - 4)
sz := t.bucket.size * nbuckets
up := roundupsize(sz)
if up != sz {
nbuckets = up / t.bucket.size
}
}
if dirtyalloc == nil {
buckets = newarray(t.bucket, int(nbuckets))
} else {
// 若dirtyalloc不爲nil時,
// dirtyalloc指向的之前已經使用完的map的buckets,之前已使用完的map和當前map具有相同類型的t和b,這樣它buckets可以拿來複用
// 此時只需對dirtyalloc進行清除操作就可以作爲當前map的buckets
buckets = dirtyalloc
size := t.bucket.size * nbuckets
// 下面是清空dirtyalloc操作
if t.bucket.ptrdata != 0 { // map中key或value是指針類型
memclrHasPointers(buckets, size)
} else {
memclrNoHeapPointers(buckets, size)
}
}
if base != nbuckets { // 多創建一些溢出桶
nextOverflow = (*bmap)(add(buckets, base*uintptr(t.bucketsize)))
// 溢出桶的最後一個的overflow字段指向buckets
last := (*bmap)(add(buckets, (nbuckets-1)*uintptr(t.bucketsize)))
last.setoverflow(t, (*bmap)(buckets))
}
return buckets, nextOverflow
}
我們畫出桶初始化時候的分配示意圖:
通過上面分析整個映射創建過程,可以看到使用make創建map時候,返回都是hmap類型指針,這也就說明Go語言中映射是引用類型。
訪問映射操作
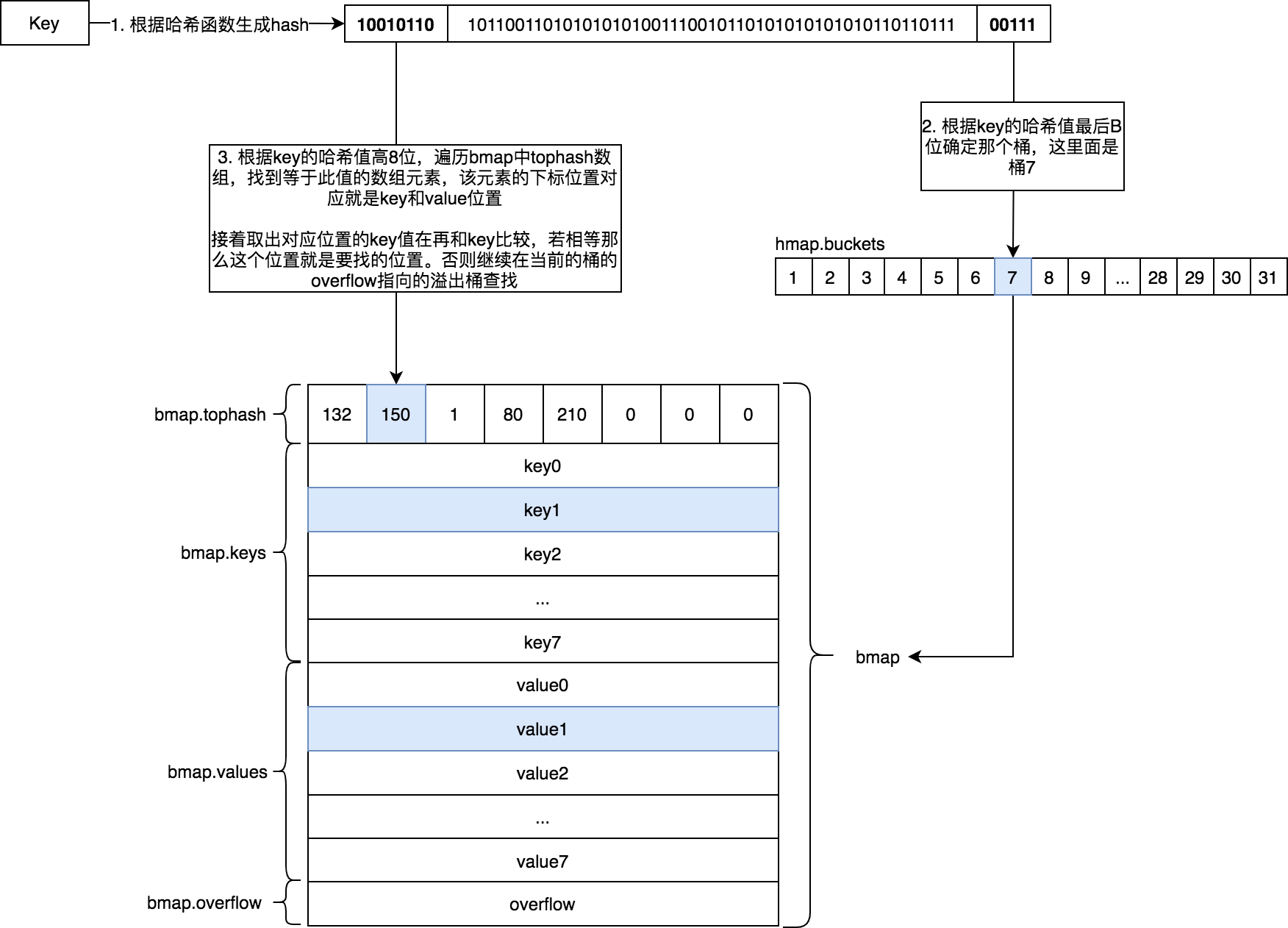
訪問映射涉及到key定位的問題,首先需要確定從哪個桶找,確定桶之後,還需要確定key-value具體存放在哪個單元裏面(每個桶裏面有8個坑位)。key定位詳細流程如下:
- 首先需根據hash函數計算出key的hash值
- 該key的hash值的低
hmap.B位的值是該key所在的桶 - 該key的hash值的高8位,用來快速定位其在桶具體位置。一個桶中存放8個key,遍歷所有key,找到等於該key的位置,此位置對應的就是值所在位置
- 根據步驟3取到的值,計算該值的hash,再次比較,若相等則定位成功。否則重複步驟3去
bmap.overflow中繼續查找。 - 若
bmap.overflow鏈表都找個遍都沒有找到,則返回nil。
當m爲2的x冪時候,n對m取餘數存在以下等式:
n % m = n & (m -1)
舉個例子比如:n爲15,m爲8,n%m等7, n&(m-1)也等於7,取餘應儘量使用第二種方式,因爲效率更高。
那麼對於映射中key定位計算就是:
key對應value所在桶位置 = hash(key)%(hmap.B << 1) = hash(key) & (hmap.B <<1 - 1)
那麼爲什麼上面key定位流程步驟2中說的卻是根據該key的hash值的低hmap.B位的值是該key所在的桶。兩者是沒有區別的,只是一種意思不同說法。
直接訪問與逗號ok模式訪問
訪問映射操作方式有兩種:
第一種直接訪問,若key不存在,則返回value類型的零值,其底層實現mapaccess1函數:
v := a["x"]
第二種是逗號ok模式,如果key不存在,除了返回value類型的零值,ok變量也會設置爲false,其底層實現mapaccess2:
v, ok := a["x"]
爲了優化性能,Go編譯器會根據key類型採用不同底層函數,比如對於key類型是int的,底層實現是mapaccess1_fast64。具體文件可以查看runtime/map_fastxxx.go。優化版本函數有:
| key 類型 | 方法 |
|---|---|
| uint64 | func mapaccess1_fast64(t *maptype, h *hmap, key uint64) unsafe.Pointer |
| uint64 | func mapaccess2_fast64(t *maptype, h *hmap, key uint64) (unsafe.Pointer, bool) |
| uint32 | func mapaccess1_fast32(t *maptype, h *hmap, key uint32) unsafe.Pointer |
| uint32 | func mapaccess2_fast32(t *maptype, h *hmap, key uint32) (unsafe.Pointer, bool) |
| string | func mapaccess1_faststr(t *maptype, h *hmap, ky string) unsafe.Pointer |
| string | func mapaccess2_faststr(t *maptype, h *hmap, ky string) (unsafe.Pointer, bool) |
這裏面我們這分析通用的mapaccess1函數。
func mapaccess1(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
if h == nil || h.count == 0 { // map爲nil或者map中元素個數爲0,則直接返回零值
if t.hashMightPanic() {
t.hasher(key, 0) // see issue 23734
}
return unsafe.Pointer(&zeroVal[0])
}
if h.flags&hashWriting != 0 { // 有其他Goroutine正在寫map,則直接panic
throw("concurrent map read and map write")
}
hash := t.hasher(key, uintptr(h.hash0)) // 計算出key的hash值
m := bucketMask(h.B) // m = 2^h.B - 1
b := (*bmap)(add(h.buckets, (hash&m)*uintptr(t.bucketsize))) // 根據上面介紹的取餘操作轉換成位與操作來獲取key所在的桶
if c := h.oldbuckets; c != nil { // 如果oldbuckets不爲0,說明該map正在處於擴容過程中
if !h.sameSizeGrow() { // 如果不是等容量擴容,此時buckets大小是oldbuckets的兩倍,那麼m需減半,然後用來定位key在舊桶中位置
m >>= 1
}
oldb := (*bmap)(add(c, (hash&m)*uintptr(t.bucketsize))) // 獲取key在舊桶的桶
if !evacuated(oldb) { // 如果舊桶數據沒有遷移新桶裏面,那就在舊桶裏面找
b = oldb
}
}
top := tophash(hash) // 計算出key的tophash
bucketloop:
for ; b != nil; b = b.overflow(t) { // for循環實現功能是先從當前桶找,若未找到則當前桶的溢出桶b.overfolw(t)查找,直到溢出桶爲nil
for i := uintptr(0); i < bucketCnt; i++ { // 每個桶有8個單元,循環這8個單元,一個個找
if b.tophash[i] != top { // 如果當前單元的tophash與key的tophash不一致,
if b.tophash[i] == emptyRest { // 若單元tophash值是emptyRest,則直接跳出整個大循環,emptyRest表明當前單元和更高單元存儲都爲空,所以無需在繼續查找下去了
break bucketloop
}
continue // 繼續查找桶其他的單元
}
// 此時已找到tophash等於key的tophash的桶單元,此時i記錄這桶單元編號
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize)) // dataOffset是bmap.keys相對於bmap的偏移,k記錄key存在bmap的位置
if t.indirectkey() { // 若key是指針類型
k = *((*unsafe.Pointer)(k))
}
if t.key.equal(key, k) {// 如果key和存放bmap裏面的key相等則獲取對應value值返回
// value在bmap中的位置 = bmap.keys相對於bmap的偏移 + 8個key佔用的空間(8 * keysize) + 該value在bmap.values中偏移(i * t.elemsize)
e := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
if t.indirectelem() {
e = *((*unsafe.Pointer)(e))
}
return e
}
}
}
return unsafe.Pointer(&zeroVal[0])
}
賦值映射操作
在map中增加和更新key-value時候,都會調用runtime.mapassign方法,同訪問操作一樣,Go編譯器針對不同類型的key,會採用優化版本函數:
| key 類型 | 方法 |
|---|---|
| uint64 | func mapassign_fast64(t *maptype, h *hmap, key uint64) unsafe.Pointer |
| unsafe.Pointer | func mapassign_fast64ptr(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer |
| uint32 | func mapassign_fast32(t *maptype, h *hmap, key uint32) unsafe.Pointer |
| unsafe.Pointer | func mapassign_fast32ptr(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer |
| string | func mapassign_faststr(t *maptype, h *hmap, s string) unsafe.Pointer |
這裏面我們只分析通用的方法mapassign:
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
if h == nil { // 對於nil map賦值操作直接panic。需要注意的是訪問nil map返回的是value類型的零值
panic(plainError("assignment to entry in nil map"))
}
if h.flags&hashWriting != 0 { // 有其他Goroutine正在寫操作,則直接panic
throw("concurrent map writes")
}
hash := t.hasher(key, uintptr(h.hash0)) // 計算出key的hash值
h.flags ^= hashWriting // 將寫標誌位置爲1
if h.buckets == nil { // 惰性創建buckets,make創建map時候,並未初始buckets,等到mapassign時候在創建初始化
h.buckets = newobject(t.bucket) // newarray(t.bucket, 1)
}
again:
bucket := hash & bucketMask(h.B) // bucket := hash & (2^h.B - 1)
if h.growing() { // 如果當前map處於擴容過程中,則先進行擴容,將key所對應的舊桶先遷移過來
growWork(t, h, bucket)
}
b := (*bmap)(unsafe.Pointer(uintptr(h.buckets) + bucket*uintptr(t.bucketsize))) // 獲取key所在的桶
top := tophash(hash) // 計算出key的tophash
var inserti *uint8 // 指向key的tophash應該存放的位置,即bmap.tophash這個數組中某個位置
var insertk unsafe.Pointer // 指向key應該存放的位置,即bmap.keys這個數組中某個位置
var elem unsafe.Pointer // 指向value應該存放的位置,即bmap.values這個數組中某個位置
bucketloop:
for {
for i := uintptr(0); i < bucketCnt; i++ {
if b.tophash[i] != top {
if isEmpty(b.tophash[i]) && inserti == nil { // 當i單元的tophash值爲空,那麼說明該單元可以用來存放key-value。
// 再加上inserti == nil條件就是inserti只找到第一個空閒的單元即可
inserti = &b.tophash[i]
insertk = add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
elem = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
}
if b.tophash[i] == emptyRest { // 如果i單元的tophash值爲emptyRest,那麼剩下單元也不用繼續找了,剩下單元一定都是空的
break bucketloop
}
continue
}
// 上面代碼是先找到第一個爲空的桶單元,然後把該桶單元相關的tophash、key、value等位置信息記錄在inserti,insertk,elem臨時變量上。
// 這樣當key沒有在map中情況下,可以拿inserti,insertk,elem這變量,將該key的信息寫入到桶單元中,這種情況下key是一個新key,這種賦值操作屬於新增操作。
// 下面代碼部分就是處理中map已存在key的情況,這時候,我們只需要找到key所在桶單元中value的位置,然後把value新值寫入即可。
// 這種情況下key是一箇舊key,這種賦值操作屬於更新操作。
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
if t.indirectkey() {
k = *((*unsafe.Pointer)(k))
}
if !t.key.equal(key, k) {
continue
}
if t.needkeyupdate() {
typedmemmove(t.key, k, key)
}
elem = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
goto done
}
ovf := b.overflow(t) // 當前桶沒有找到,繼續在其溢出桶裏面找,
if ovf == nil { // 直到都沒有找到,那麼跳出循環,不在找了。
break
}
b = ovf
}
// 當map未擴容中,那麼就判斷當前map是否需要擴容,擴容條件是以下兩個條件符合任意之一即可:
// 1. 是否達到負載因子的閾值6.5
// 2. 溢出桶是否過多
if !h.growing() && (overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) {
hashGrow(t, h)
goto again // 跳到again標籤處,再來一遍
}
// 如果上面兩層for循環都沒有找到空的桶單元,那說明所有桶單元都寫滿了,那麼就得創建一個溢出桶了。
// 然後將數據存放到該溢出桶的第一個單元上
if inserti == nil {
newb := h.newoverflow(t, b) // 創建一個溢出桶
inserti = &newb.tophash[0]
insertk = add(unsafe.Pointer(newb), dataOffset)
elem = add(insertk, bucketCnt*uintptr(t.keysize))
}
// store new key/elem at insert position
if t.indirectkey() {
kmem := newobject(t.key)
*(*unsafe.Pointer)(insertk) = kmem
insertk = kmem
}
if t.indirectelem() {
vmem := newobject(t.elem)
*(*unsafe.Pointer)(elem) = vmem
}
typedmemmove(t.key, insertk, key)
*inserti = top // 寫入key的tophash值
h.count++ // 更新map的元素計數
done:
if h.flags&hashWriting == 0 {
throw("concurrent map writes")
}
h.flags &^= hashWriting // 將map的寫標誌置爲0,那麼其他Gorountine可以進行寫入操作了
if t.indirectelem() {
elem = *((*unsafe.Pointer)(elem))
}
return elem
}
我們梳理總結下mapassign函數執行流程:
-
首先進行寫標誌檢查和桶初始化檢查。如果當前map寫標誌位已經置爲1,那麼肯定有它Gorountine正在進行寫操作,那麼直接panic。桶初始化檢查是當map的桶未創建情況下,則在桶初始化檢查階段創建一個桶。
-
接下來判斷桶是否處在擴容過程中,如果處在擴容過程中,那麼先將當前key所在舊桶全部遷移到新桶中,然後再接着遷移一箇舊桶,也就是說每次mapasssign最多隻遷移兩個舊桶。爲什麼一定要先遷移key所在的舊桶數據呢?如果key是新key,那麼舊桶中一定沒有這個key信息,這種情況遷不遷移舊桶無關緊要,但若key之前在舊桶已存在,那麼一定要先遷移,如果不這樣的話,當key的新value寫入新桶中之後再遷移,那麼舊桶中的舊數據就會覆蓋掉新桶中key的value值,爲了應對這種情況,所以一定要先遷移key所在舊桶數據。
-
接下就是兩層for循環。第一層for循環就是遍歷當前key所在桶,以及桶的溢出桶,直到桶的所有溢出桶都遍歷一遍後,終止該層循環。第二層for循環遍歷的是第一層for循環每次得到的桶中的8個桶單元。兩層for循環是爲了在map中找到key,如果找到key,那隻需更新key對應value值就可。在循環過程中,會記錄下第一個爲空的桶單元,這樣在未找到key的情況時候,就把key-value信息寫入這個桶單元中。如果map中未找到key,且也未找到空的桶單元,那麼沒有辦法了,只能創建一個溢出桶來存放該key-value。
-
接下里判斷當前map是否需要擴容,如果需要擴容,則調用hashGrow函數,將舊的buckets掛到hmap.oldbuckets字段上,再接着通過goto語法跳轉標籤形式跳到流程2繼續執行下去
-
最後就是將key的tophash,key值寫入到找到的桶單元中,並返回桶單元的value地址。value的寫入是拿到mapassign返回的地址,再寫入的。
接下來我們看下溢出桶創建操作:
- 首先會從預分配的溢出桶列表中取,如果未取到,則會現場創建一個溢出桶
- 若map的key和value都不是指針類型,那麼會將溢出桶記錄到hmap.extra.overflow中
func (h *hmap) newoverflow(t *maptype, b *bmap) *bmap {
var ovf *bmap
if h.extra != nil && h.extra.nextOverflow != nil {
ovf = h.extra.nextOverflow // 從上面分析映射的創建過程代碼中,我們知道創建map的buckets時候,有時候會順便創建一些溢出桶,
// h.extra.nextOverflow就是指向這些溢出桶
if ovf.overflow(t) == nil { // ovf不是最後一個溢出桶
h.extra.nextOverflow = (*bmap)(add(unsafe.Pointer(ovf), uintptr(t.bucketsize))) // extra.nextOverflow指向下一個溢出桶
} else { // ovf是最後一個溢出桶
ovf.setoverflow(t, nil) // 將ovf.overflow設置nil
h.extra.nextOverflow = nil
}
} else {
// 沒有可用的預分配的溢出桶,則創建一個溢出桶
ovf = (*bmap)(newobject(t.bucket))
}
h.incrnoverflow() // 更新溢出桶計數,這個溢出桶計數可用來是否進行rehash的依據
if t.bucket.ptrdata == 0 { // 如果map中的key和value都不是指針類型,那麼將溢出桶指針添加到extra.overflow這個切片中
h.createOverflow()
*h.extra.overflow = append(*h.extra.overflow, ovf)
}
b.setoverflow(t, ovf)
return ovf
}
func (h *hmap) createOverflow() {
if h.extra == nil {
h.extra = new(mapextra)
}
if h.extra.overflow == nil {
h.extra.overflow = new([]*bmap)
}
}
func (b *bmap) overflow(t *maptype) *bmap {
return *(**bmap)(add(unsafe.Pointer(b), uintptr(t.bucketsize)-sys.PtrSize))
}
func (b *bmap) setoverflow(t *maptype, ovf *bmap) {
*(**bmap)(add(unsafe.Pointer(b), uintptr(t.bucketsize)-sys.PtrSize)) = ovf
}
func (h *hmap) incrnoverflow() {
if h.B < 16 {
h.noverflow++
return
}
// 當h.B大於等於16時候,有1/(1<<(h.B-15))的概率會更新h.noverflow
// 比如h.B == 18時,mask==7,那麼fastrand & 7 == 0的概率就是1/8
mask := uint32(1)<<(h.B-15) - 1
if fastrand()&mask == 0 {
h.noverflow++
}
}
映射的刪除操作
在map中刪除key-value時候,都會調用runtime.mapdelete方法,同訪問操作一樣,Go編譯器針對不同類型的key,會採用優化版本函數:
| key 類型 | 方法 |
|---|---|
| uint64 | func mapdelete_fast64(t *maptype, h *hmap, key uint64) |
| uint32 | func mapdelete_fast32(t *maptype, h *hmap, key uint32) |
| string | func mapdelete_faststr(t *maptype, h *hmap, ky string) |
這裏面我們只大概分析通用刪除操作mapdelete函數:
刪除map中元素時候並不會釋放內存。刪除時候,會清空映射中相應位置的key和value數據,並將對應的tophash置爲emptyOne。此外會檢查當前單元旁邊單元的狀態是否也是空狀態,如果也是空狀態,那麼會將當前單元和旁邊空單元狀態都改成emptyRest。
func mapdelete(t *maptype, h *hmap, key unsafe.Pointer) {
if h == nil || h.count == 0 { // 對nil map或者數量爲0的map進行刪除
if t.hashMightPanic() {
t.hasher(key, 0) // see issue 23734
}
return
}
if h.flags&hashWriting != 0 { // 有其他Goroutine正在寫操作,則直接panic
throw("concurrent map writes")
}
hash := t.hasher(key, uintptr(h.hash0))
h.flags ^= hashWriting // 將寫標誌置爲1,刪除操作也是一種寫操作
bucket := hash & bucketMask(h.B)
if h.growing() {
growWork(t, h, bucket)
}
b := (*bmap)(add(h.buckets, bucket*uintptr(t.bucketsize)))
bOrig := b
top := tophash(hash)
search:
for ; b != nil; b = b.overflow(t) {
for i := uintptr(0); i < bucketCnt; i++ {
if b.tophash[i] != top {
if b.tophash[i] == emptyRest {
break search
}
continue
}
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
k2 := k
if t.indirectkey() {
k2 = *((*unsafe.Pointer)(k2))
}
if !t.key.equal(key, k2) {
continue
}
// 清空key
if t.indirectkey() {
*(*unsafe.Pointer)(k) = nil
} else if t.key.ptrdata != 0 {
memclrHasPointers(k, t.key.size)
}
// 清空value
e := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
if t.indirectelem() {
*(*unsafe.Pointer)(e) = nil
} else if t.elem.ptrdata != 0 {
memclrHasPointers(e, t.elem.size)
} else {
memclrNoHeapPointers(e, t.elem.size)
}
b.tophash[i] = emptyOne // 將tophash置爲emptyOne
// 下面代碼是將當前單元附近的emptyOne狀態的單元都改成emptyRest狀態
if i == bucketCnt-1 {
if b.overflow(t) != nil && b.overflow(t).tophash[0] != emptyRest {
goto notLast
}
} else {
if b.tophash[i+1] != emptyRest {
goto notLast
}
}
for {
b.tophash[i] = emptyRest
if i == 0 {
if b == bOrig {
break
}
c := b
for b = bOrig; b.overflow(t) != c; b = b.overflow(t) {
}
i = bucketCnt - 1
} else {
i--
}
if b.tophash[i] != emptyOne {
break
}
}
notLast:
h.count--
break search
}
}
if h.flags&hashWriting == 0 {
throw("concurrent map writes")
}
h.flags &^= hashWriting
}
擴容方式
Go語言中映射擴容採用漸進式擴容,避免一次性遷移數據過多造成性能問題。當對映射進行新增、更新時候會觸發擴容操作然後進行擴容操作(刪除操作只會進行擴容操作,不會進行觸發擴容操作),每次最多遷移2個bucket。擴容方式有兩種類型:
- 等容量擴容
- 雙倍容量擴容
等容量擴容
當對一個map不停進行新增和刪除操作時候,會創建了很多溢出桶,而加載因子沒有超過閾值不會發生雙倍容量擴容,這些桶利用率很低,就會導致查詢效率變慢。這時候就需要採用等容量擴容,使用桶中數據更緊湊,減少溢出桶數量,從而提高查詢效率。等容量擴容的條件是在未達到加載因子閾值情況下,如果B小於15時,溢出桶的數量大於2^B,B大於等於15時候,溢出桶數量大於2^15時候會進行等容量擴容操作:
func tooManyOverflowBuckets(noverflow uint16, B uint8) bool {
if B > 15 {
B = 15
}
return noverflow >= uint16(1)<<(B&15)
}
雙倍容量擴容
雙倍容量擴容指的是桶的數量變成舊桶數量的2倍。當映射的負載因子超過閾值時候,會觸發雙倍容量擴容。
func overLoadFactor(count int, B uint8) bool {
return count > bucketCnt && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen)
}
不論是等容量擴容,還是雙倍容量擴容,都會新創建一個buckets,然後將hmap.buckets指向這個新的buckets,hmap.oldbuckets指向舊的buckets。